Payload System for Indoor Mapping for Disaster Rescue
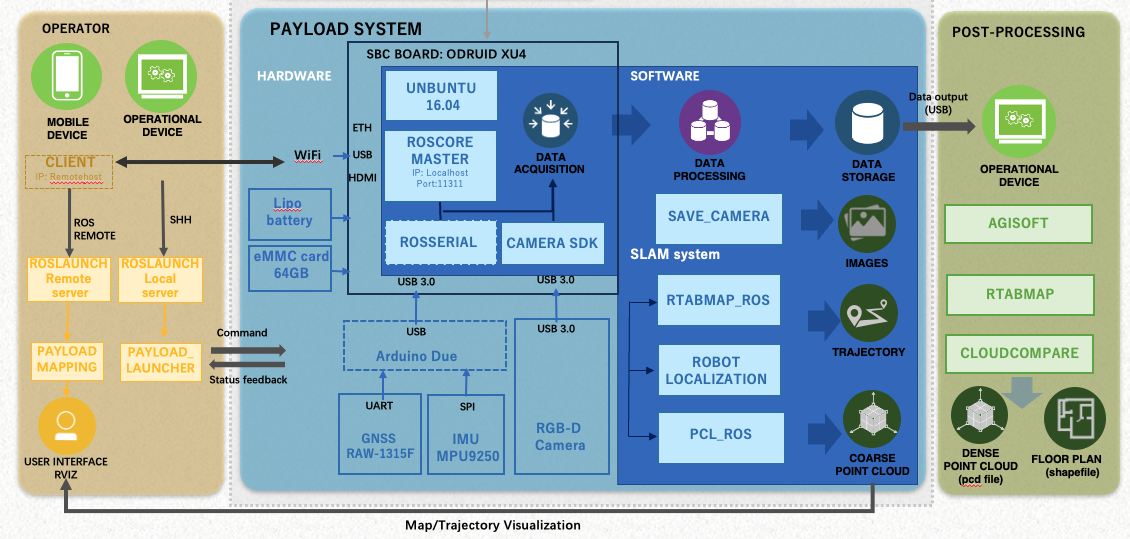
This project developed a payload system for indoor mapping specifically designed for disaster rescue purposes. The system consists of a depth camera, IMU (Inertial Measurement Unit), and a rover platform. The software implementation is based on RTMBSLAM (Real-Time Multi-Baseline SLAM) with Extended Kalman Filter (EKF) for sensor fusion, enabling robust and accurate indoor mapping in challenging environments. The payload system enables autonomous navigation and mapping in disaster scenarios where GPS signals are unavailable or unreliable. By fusing data from multiple sensors through EKF, the system provides reliable pose estimation and real-time mapping capabilities essential for rescue operations.